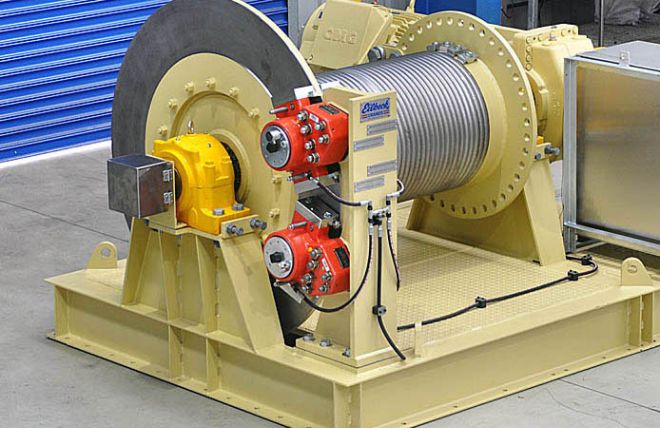
50kN Telescopic Double Drum Chute Winch
| Project Ref: | 70075 |
| Client: | BMA Coal Operations PL |
| Project: | Hay Point |
| Scope: |
50kN Tele Chute Winch (Tilting Bridge Hoist Assembly Telescopic Chute Winch) |
Winch Performance Features
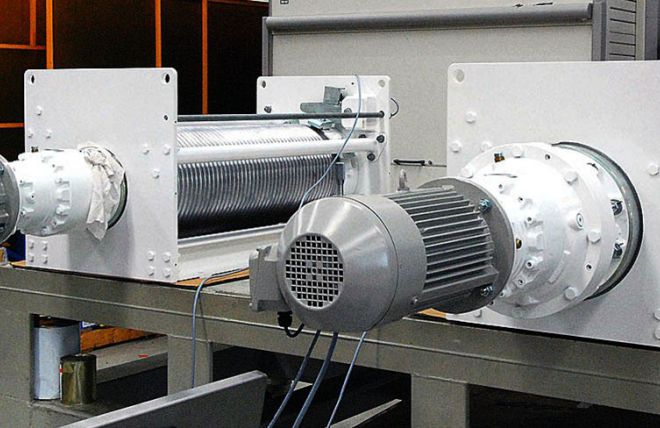
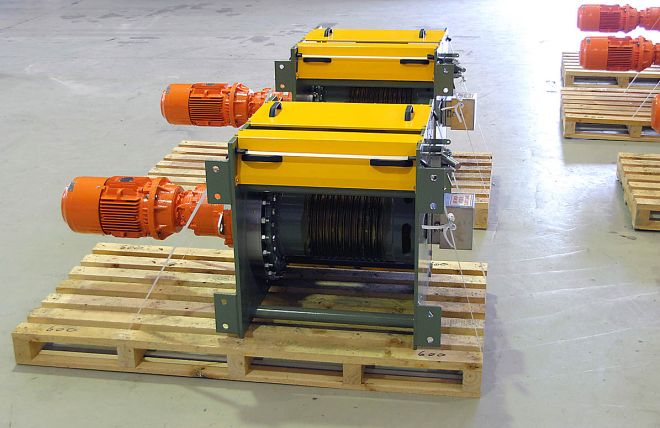
- The dual drum, single rope winch is manufactured as a Telescopic Chute Winch.
- The Telescopic Chute Winch is both powered and controlled from the clients plant control system. This ensures the winching motions are interlocked with all other process plant machine moments, alarms & faults.
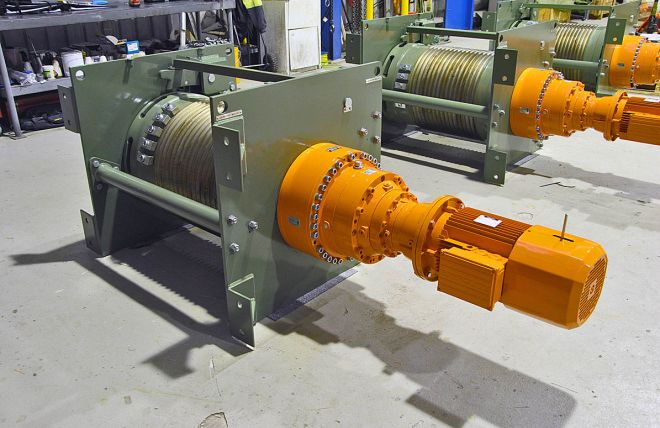
- The Telescopic Chute Winch is primarily driven by its geared electric motor. The winch also includes a secondary pony drive braked motor that can be coupled to the gearbox and drum assembly.
- The Telescopic Chute Winch includes a hydraulic power pack to control the high and low speed brakes. For the high speed brake, there is one fail safe spring return calliper acting directly on the motor shaft.
- For the low speed brakes there are four fail safe spring return callipers acting on the winch drum brake disc.
- The Telescopic Chute Winch includes Drum Lock Mechanism & Plunger Limit Switches. This allows the low speed brake disc & hoist drum to be locked mechanically. An electrical control interlock should inhibit motions whilst this arrangement is locked.
- The Telescopic Chute Winch includes a grooved drum for accurate location of the rope during haul in operations. The grooves have left a right handing to match the (2) rope arrangements.
- The Telescopic Chute Winch includes a hydraulic power pack for actuation of the low speed brake calipers. Pressure feedback switches assist the maintaining of correct hydraulic pressures.
- The drive is designed as a singular speed system, with nominal line speed of 16m per minute.
- The Telescopic Chute Winch is a dual drum, single rope, single layer system. The drive has a modular construction of motor and gear unit to enable easy replacement.
- Winch Overload is evaluated by the clients plant control system.
- The Telescopic Chute Winch includes a proximity switch to detect when the pony drive has been engaged to the gearbox. This switch shall prevent main winch motor from running as this will cause pony drive to over speed and sustain damage.
- The Telescopic Chute Winch includes one mechanical limit switch per bar to detect position of rope. Positive feedback (contact closed) when rope is slack and switch is acted upon.









No images were found.






No images were found.